

Read my technical article with a bit of anecdote of course!

I’ve hand steered boat sailing on many different bodies of water and I’ll tell you the last place I want to be doing it is while sailing offshore at 4 AM past the Savanah River where the AIS display looks like pac-man and its cold and blowing and your crew is seasick sleeping on the floor for fuck sake because the wiring to the below deck auto pilot unit in the quarter berth was too janky to risk being pulled out. But despite that precaution to not sleep next to the wiring it gets ripped out anyway. Luckily my crew could steer while I spliced that shit back together.
The first time this happened I was sailing solo overnight on the Pamlico Sound I just let the boat round up and kinda steer itself close hauled the wind wasn’t too bad or the waves. I rewired it really quick and then got underway again.
Honestly I think it happened AGAIN (why am I like this) on mini passage from Beufort, NC to Wrightsville Beach. And then obviously with my crew off the Savanah River. So basically every fucking passage all the way down the coast.
Now as I prepare to head North I’m doing my damn best to make sure that doesn’t happen again. I’ve soldered ll the connections, used heat shrink, and have spares AP unit, motor controller, and actuator rigged up ready to go in case one fails.
I’m also giving a go at sheet-to-tiller because at this point I want as much back up as possible!
Which leads to my next point; I want a wind vane. But I also needed to get my shit together wring. I’ve had fun with auto pilots and sheet to tiller and will strive to have those onboard a vessel in addition to a vane… Maybe it’s a redundancy thing that will make me feel safer. Or who knows maybe I’m one of those people who never just “goes” because they think they always need that next piece of gear. I have a friend who solo’d his Dailer26 from Hawaii to California, then trucked it to the Gulf, launched and then sailed back up and down the east coast.
He only had a tiller pilot. So, yes, it can be done.
In the meantime, I’ve gotten pretty familiar with the Pypilot Auto Pilot. An open source software, below deck auto pilot computer and motor controller unit. It’s sold here pypilot.org , for just under $200. For any sailor on a budget that’s pretty enticing. But it comes with its caveats, like rigging your own actuator from an old tiller pilot or building anew with a windshield wiper motor. And a website/online store without much direction and description.

Apparently, computer code and engineering nerds who also sail have this elite network where they talk in a secret language to each other about their own auto pilot units they’ve engineered, or the changes they’ve gone in and made to their Pypilot unit’s software.
For the rest of us…I’m not sure how anyone who isn’t a total nerd understands this shit. Even my buddy Sam Holmes who is on the way other end of the spectrum than I am when it comes to engineering didn’t understand how it worked looking at the store. I had prior knowledge to all this because I met the Pypilot engineer, Sean D’Epagnier. Without that I would have no fucking clue what those little boxes and all the wires and shit were.
Which is why I’m writing this, a guide of sorts, because even knowing what I knew setting up the new unit Sean sent me and a backup unit proved challenging. I felt like a detective. Unearthing clues. Looking for landmarks. So, I came up with a treasure map of sorts. I heard there’s pot at the end of the rainbow, or was it gold? Either way, I make no guarantees, and Sean will probably get mad about something I say here. And, people, literally this is all I know don’t ask me questions.
So without further adieu..
For the weekend sailor and summer cruising this is absolutely great. For lake, bay, river cruising, and fair weather offshore. I have not tested it in greater than 20 knots gusting 25 offshore 20 miles. It performed well but for anything greater Sean suggests a larger driver motor. I am using a motor the size of the Simrad TP22. Sean also makes a motor controller for big boats hydraulic steering, so it can be done.
I Have personally used with success on multiple passages on the Chesapeake Bay, Pamlico Sound, up to 20 miles offshore on the Atlantic Ocean.
Plan on spending at least 12 hours on all this because boats, and if you’re ADHD at all like me a lot longer/a lifetime. Also account for the amount of time it takes for Sean or someone on the forum to reply to questions. Which, he will. Unless he’s crossing an ocean or something. Keep in mind Sean also hand makes this shit on his trimaran. Some of it’s automated.
1. I have the TinyPilot Autopilot Computer for $120 and the Motor Controller for $65. I don’t know if Sean includes an adapter or what he’d recommend but the original unit he gave me and what I still use is a 12V in (+,-) 5V3A out (USB). I also have spares. The positive and negative wires of the motor controller are wired together with the positive and negative wires of the autopilot computer adapter, to the same switch. Then with the cord provided the AP computer and motor controller link together. And it turns on and off as a whole unit.
2. The Driver/ Actuator / Motor. This is the arm thing that’s physically going to drive the boat. You just wired the brains. There are two more wires that come out of the motor controller, these need a female snap fittings (I have no idea if that’s the right name). The bitter end of the wires on the actuator will have the male fittings. You need to open up the busted tiller pilot you got that’s electronics fried out and carefully follow the wires to find the two that connect to the actual motor itself. Clip those. You’re in business. Splice those to the wire with the male end fittings. You want this wiring to be long enough to reach the helm from where you mount the unit.

Later by trial and error you will figure out which colored wire plugs in to which fitting on the motor controller in order for the unit not to drive backwards…if that makes any sense at all.
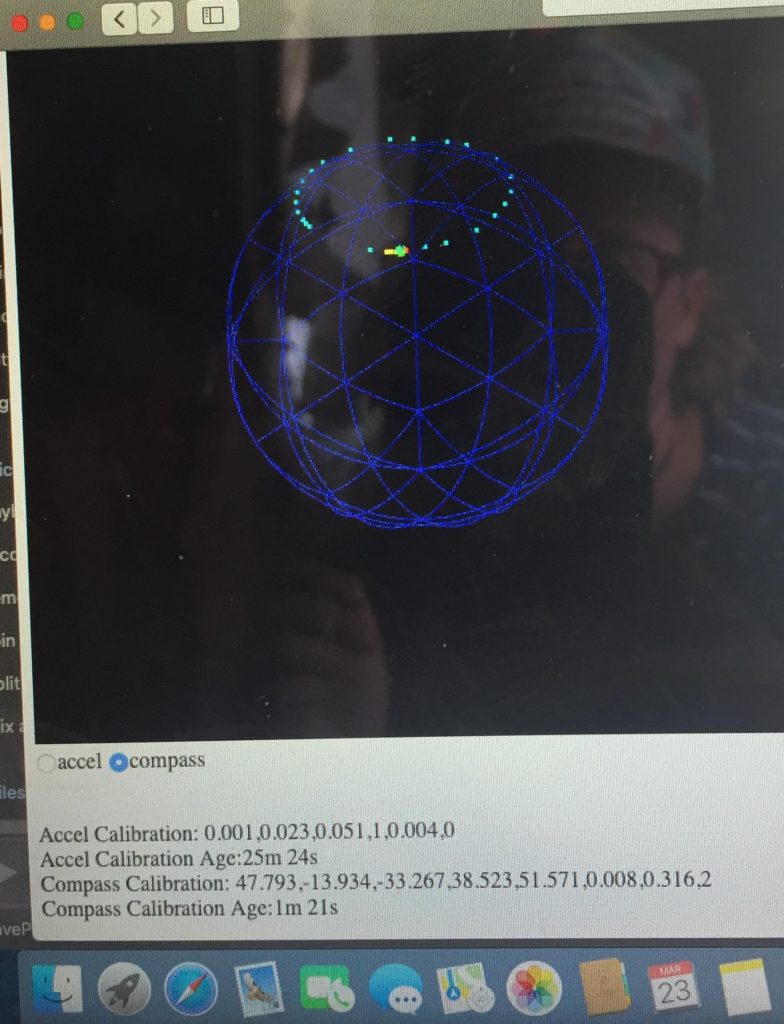
3. Now it’s time to calibrate the acellerometer. This may or may not need to be done or spelled right, but can be done on the web by connecting a device to to the pypilot wifi and going to the control page at pypilot.io . You then have to place the unit on each of its six sides for a few seconds to align the inertial sensors. If you’ve done it correctly you’ll see the sensor dots inside the sphere. It’s actually quite satisfying.
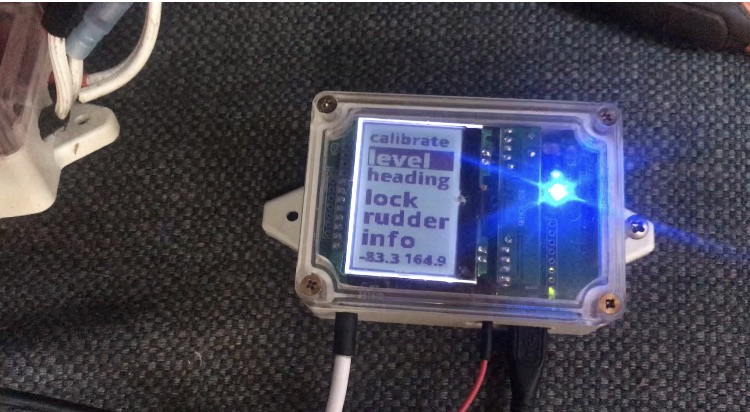
4. Now mount that shit. Find level in the settings menu and click it to level the sensors.
5. Calibrate the compass by sailing, sculling, or motoring the boat in a circle (but Sean actually says 180 degrees is fine). This is mostly automatic and will recalibrate every time the boat turns 180 degrees and its on! You can also see the dots fall within the sphere once calibrated. Neato.
6. Set the magnetic offset (I have no idea why this is the way it is I only know that it IS). I used a bunch of compasses to try and get close as possible and I just adjusted the offset until the heading on the screen matched the heading on my other compass’.
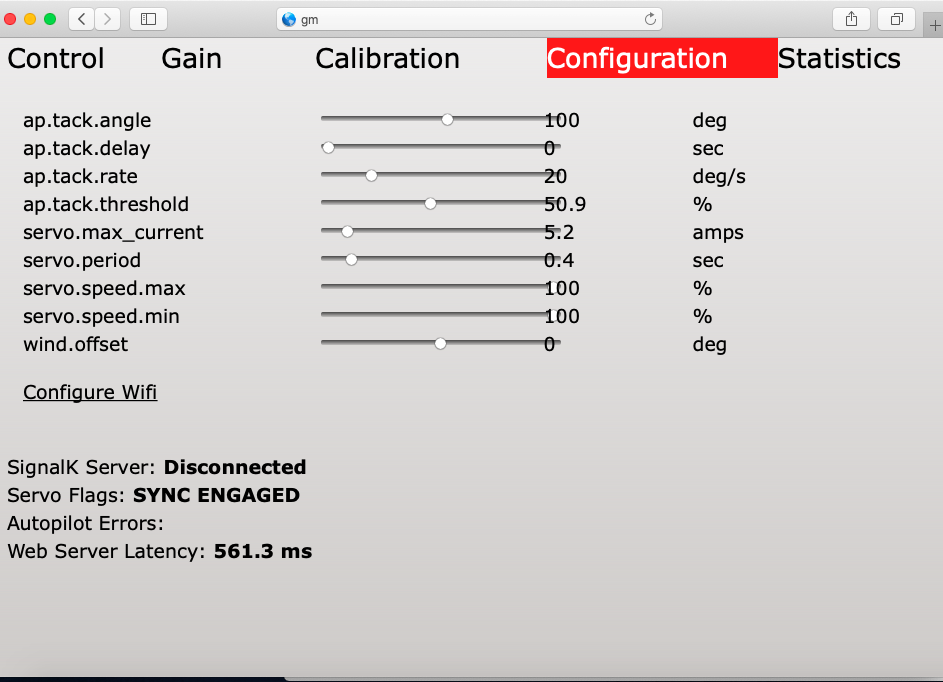
7. Now just a few more settings. I set the Servo.max_current to 5 amps. This is pretty self explanatory I guess as it controls the maximum flow of current. The max and min servo speeds should also he set to 100.
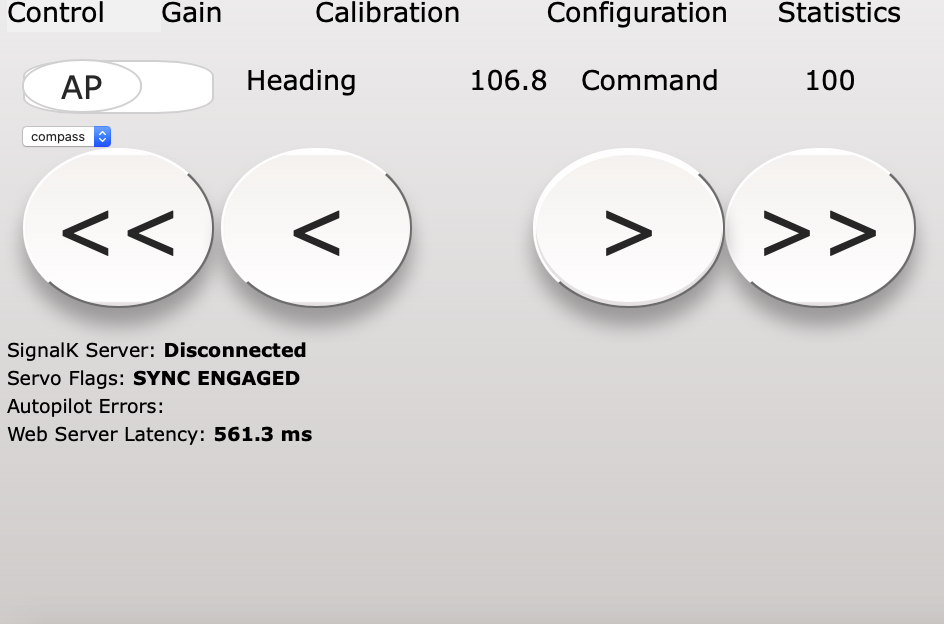
Note: Pypilot can be controlled by a remote, through wifi on any device by connecting to the automatic pypilot wifi network and going to pypilot.io, or connecting on the plugin through OpenCPN. But not yet can it be controlled with your mind. Although I think he’s working on it steering to wind! Crazy!
At this point you’re ready to test your unit. I have tested the two units I just set up successfully motoring around the anchorage. I still have a few more boat projects to complete, including sheet to tiller, before heading offshore to test the units (plus sheet to tiller) and then using the Pypilot on and approximately 600NM journey north. I will report back.
As the Pypilot tag line reads, “Finally, a Liberated Auto Pilot,” this hacker unit is pretty anti-capitalist and boat punk as fuck. Thanks to Sean for letting me test Pypilot for free, get started on yours for under $200 at pypilot.org .
Some of the problems I’ve had
-I was always ripping wires out from the actuator to motor controller, oops. I connected them to be much stronger by soldering, but did not hide them behind a bulkhead which would be best in fact I’ll probably do that before setting sail damn it there’s always more jobs.
-screen burned out on one unit, so had to be controlled through wifi but for some reason the wifi was failing intermittently so couldn’t control through web browser either which meant 0 control….Sean sent me a new unit which has a wireless remote that can adjust AP from the cockpit, plus regular remote you have to point to the motor controller, + wifi..so even if screen burned out + wifi failed again, this one should still be able to be adjusted …however you would not be able to see the course heading
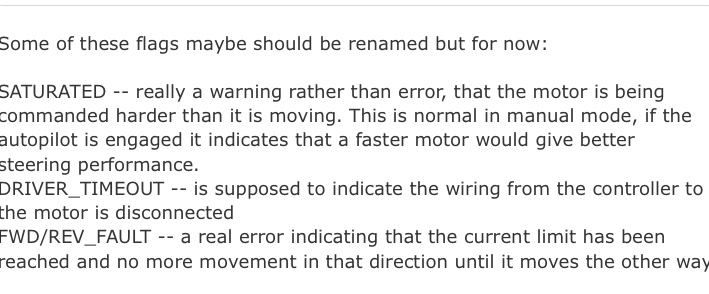
-driver faulting. I still low key chalk this up to really light/nearly non existent winds but like 3 ft swells so not really enough forward momentum. But I fixed this by changing the servo. max, min, and current settings.